基于STM32单片机的使用MPU6050传感器的利用卡尔曼滤波器算法的角度测量仪
”51单片机 STM32单片机 MPU6050 卡尔曼滤波器 角度测量仪“ 的搜索结果
利用STM32主控单元与三轴陀螺仪MPU6050。MPU6050进行倾角测量,对测得的加速度和角速度数据进行AHRS数据融合,最终得到姿态角,姿态角再进行卡尔曼滤波。STM32单片机控制步进电机运动,对检测到的姿态角做最优控制。
10分钟速通!你没看错,就是10min,从0基础到灵活运用mpu6050。不信?往下看看就会:嗷~原来如此。
详解STM32+MPU6050姿态解算—附3个算法源码—卡尔曼滤波+四元数法+互补滤波——可应用在无人机/平衡车/机器人等方面
========================================== ...本文设计了一种基于STM32/51单片机的使用MPU6050传感器的利用卡尔曼滤波器算法的角度测量仪(直接上代码) 代码下载(附PPT) MPU-6050 :是6轴运动处理
基于STM32单片机的使用MPU6050传感器的利用卡尔曼滤波器算法的角度测量仪 相关下载链接://download.csdn.net/download/u011344545/14946144?utm_source=bbsseo
最近开始使用了6轴姿态传感器MPU6050,准备学习一下姿态融合,于是打算写下了这篇博客。

文章主要讲述了mpu6050的姿态获取原理,使用HAL库编程时Cube MX的配置和Cube IDE编程,DMP解算MPU6050姿态的过程,附带开源代码。


如果两个变量的变化趋势一致,也就是说如果其中一个变量大于其自身的期望值,另一个变量也大于其自身的期望值...协方差方程中因子之间的相关性较大时,权重(相关系数)接近于1,也就是得到的结果取测量值的比例更大;

基于STM32的四旋翼无人机项目之MPU6050姿态解算教程,作者手把手教学MPU6050的姿态解算(含卡尔曼滤波教学),同时包含匿名上位机通讯代码教学和使用!
MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角,常应用于平衡车、飞行器等需要检测自身姿态的场景3轴加速度计 (Accelerometer) : 测量X、Y、Z轴的...
预告:代码及文档下载 一、文档主要包含资料 ...1、卡尔曼滤波(matlab代码) clear clc; N=50; CON = 25; %房间温度,假定温度是恒定的 % 系统方程 % x(k+1)=x(k)+w; % 状态方程 % y(k)=x(k)+v; % 观测方程 %%%%%%%%%
STM32F103C8T6是一款常用的低功耗、高性能的单片机,可以用来读取MPU6050传感器数据并应用卡尔曼滤波算法。 MPU6050是一种六轴惯性传感器,可以同时测量加速度和陀螺仪的数据。通过与STM32F103C8T6对接,我们可以...
MPU6050+DMP解算姿态角完整工程,使用STM32F103C8T6核心板。解算欧拉角。魔改自野火stm32代码。

MPU6050简介
上一篇文章有讲到卡尔曼滤波了,现在需要将其添加到我们之前的C52测试程序中。...STM32 相关工程,下载:STM32F10x 卡尔曼滤波 一、再看一下卡尔曼滤波程序 #include<math.h> #include "stm32...
MPU6050是一款由英国半导体公司InvenSense推出的一款6轴惯性传感器...MPU6050角度方向X 轴角度(滚转角 Roll)即为绕 X 轴旋转方向的角度,Y 轴角度(俯仰角 Pitch)即为绕 Y 轴旋转方向的角度,Z 轴角度(偏航角 Yaw。
以下是一个简单的MPU6050卡尔曼滤波的C语言实现,适配STM32F103ZET6单片机,供参考: ```c #include "stm32f10x.h" #include "mpu6050.h" #include "kalman.h" //卡尔曼滤波器 Kalman_t kalman; int main(void) {...
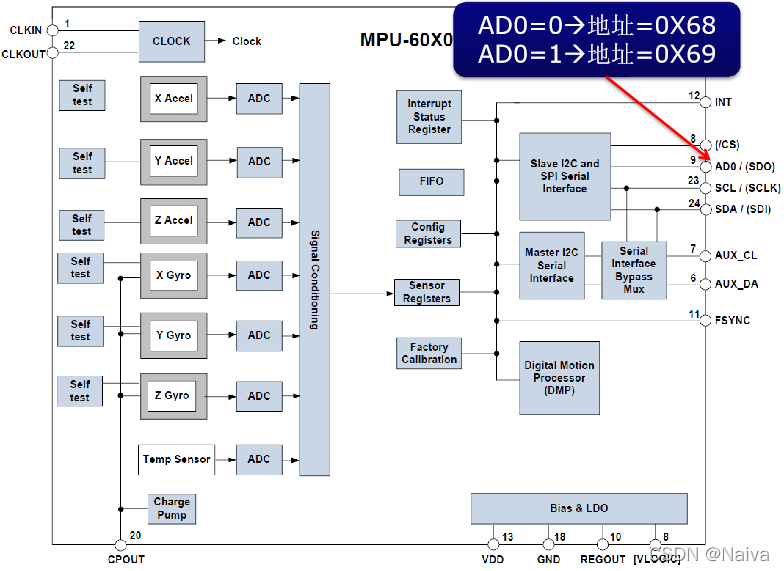
首先要明确,MPU6050 是一款姿态传感器,使用它就是为了得到待测物体(如四轴、平衡小车) x、y、z 轴的倾角(俯仰角 Pitch、滚转角 Roll、偏航角 Yaw) 。我们通过 I2C 读取到 MPU6050 的六个数据(三轴加速度 AD ...

MPU 6050姿态角度融合算法
标签: 算法

STM32是一款由意法半导体(STMicroelectronics)推出的32位单片机系列,而MPU6050是一款由英飞凌(InvenSense)推出的六轴惯性测量单元(IMU)。姿态角解算是指通过传感器获取的数据计算出物体的姿态角度,而DMP...
同步,半双工。异步通信(如串口)如果发送方发送一半突然进中断停止了,接收方是不知道的,这是不允许的,异步对硬件外设USART电路依赖性很强,虽然也可软件实现,但因为对时间要求严格所以一般不用软件。...
STM32卡尔曼滤波
推荐文章
- 小说网站系统源码|PHP付费小说网站源码带app-程序员宅基地
- Swift编码规范_swift 正则判断文件类型-程序员宅基地
- 关于shell 中return用法解释(转)_shell return-程序员宅基地
- Linux编译宏BUILD_BUG_ON_ZERO-程序员宅基地
- c51语言单片机打铃系统设计,基于单片机的自动打铃系统的设计-程序员宅基地
- 在php中使用SMTP通过密抄批量发送邮件-程序员宅基地
- python数据清洗+数据可视化_python课程题目数据清除与可视化-程序员宅基地
- 【11g】3.3 Oracle自动存储管理存储配置_oraclestorageoptions-程序员宅基地
- signature=b2f9171fa2897cefe08a669efaf58433,FULFILLMENT TRACKING IN ASSET-DRIVEN WORKFLOW MODELING-程序员宅基地
- 宜兴市计算机中等学校,重磅!江苏省陶都中等专业学校正式揭牌!-程序员宅基地